





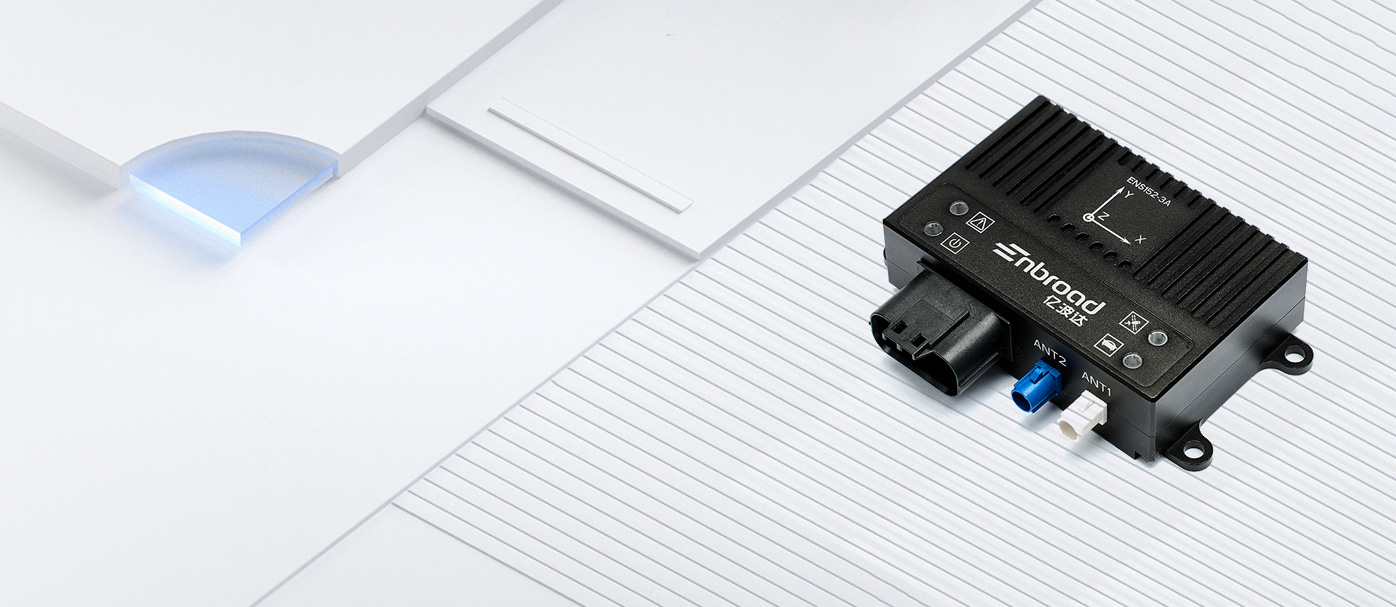
系统指标
Model | Attitude Accuracy (RMS) | Heading | Position Drift m/km | Heading Drift |
Satellite Loss (120s or 2km) | ||||
| ENS152-3A | 0.06° | 0.15°(双天线基线1m) | 0.20% | 0.2° |
GNSS 技术参数
Model | RTK Positioning Accuracy | Supported Satellite Systems | Velocity Accuracy (RMS) | |
| Horizontal | Vertical | |||
ENS152-3A | ≤0.8cm + 1ppm(1σ) | ≤1.5cm+1ppm(1σ) | BDS:B1I, B2I, B3I;GPS:L1C/A, L2C, L2P(Y), L5;GLONASS:G1, G2; Galileo:E1, E5a, E5b;QZSS:L1C/A, L2C, L5 ;SBAS:L1C/A | 0.03m/s |
IMU 技术参数
Model | Gyroscope | Accelerometer | ||||||
Range (dps) | Bias Instability (°/h) | Angular Random Walk | Full Temperature Bias | Range (dps) | Bias Instability (°/h) | Rate Random Walk | Full-Temperature Bias | |
| ENS152-3A | ±300 | <1.8°/h(X,Y)<1.4°/h(Z) | ≤0.15º/√hr | <0.1dps | ±6g | <20ug | ≤0.05m/s/√hr | 3mg |
物理参数
Model | Multi-functional Interface | Antenna Connector | Dimensions | Weight | Operating Temperature | Power Supply & Consumption | Data Update Rate |
| ENS152-3A | FH18-FH03-L22-ABE-01(CAN、RS232.RS422、PPS等接口) | FAl-RMI-TB10N01/FAI-RMI-TB10N03 | 116×90.15×29(mm) | ≤320g | -40℃~+85℃ | 9V-16V直流功耗 <10W(额定电压12V) | 100Hz |

Stabilized Platforms

Autonomous Driving

Unmanned Aerial Vehicles
Autonomous Vehicles

Unmanned Surface Vessels

Precision Agriculture

Resource Exploration

Emergency Rescue

×


扫一扫 关注亿波达

